Road Traversing Knowledge (RTK) Dataset
Nessa página disponibilizamos imagens capturadas por uma câmera de baixo custo (HP Webcam HD-4110). Esse conjunto de dados contém estradas com diferentes tipos de superfície: variações de asfalto, de outros tipos de pavimento e inclusive estradas não pavimentadas. Contém também situações com danos na estrada, como por exemplo: buracos. As imagens foram capturadas em um veículo em movimento nas cidades de Águas Mornas e Santo Amaro da Imperatriz, municípios vizinhos a Florianópolis no estado de Santa Catarina, Brasil. Também disponibilizamos grande parte dos frames separados por suas classes, como dados de teste.
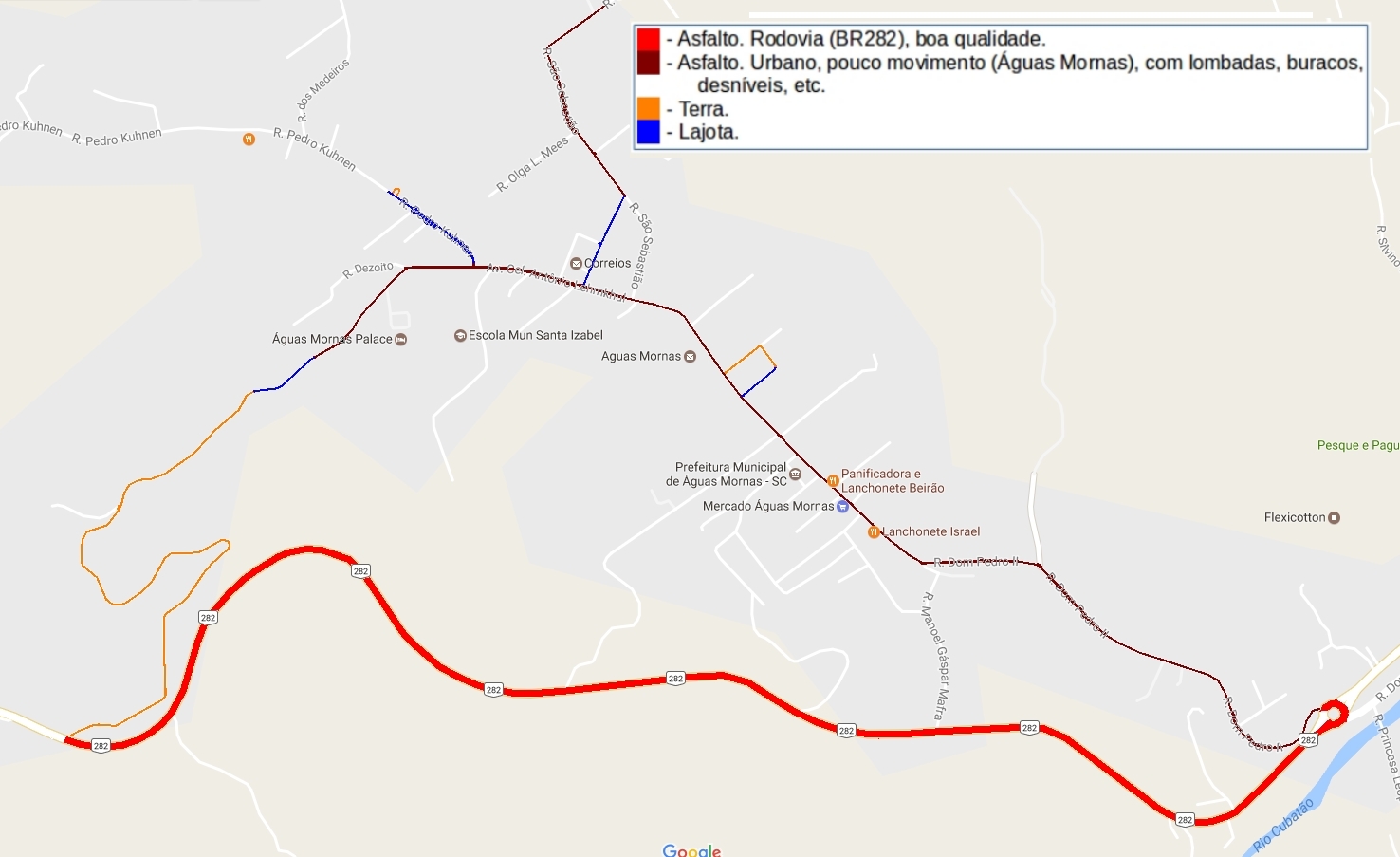
Mapa de parte da coleta das imagens.
Citação
Se você utilizar o dataset, Ground Truth, abordagem de classificação de imagens, por favor cite:
author = {Thiago Rateke and Karla Aparecida Justen and Aldo von Wangenheim},
title = {Road Surface Classification with Images Captured From Low-cost Cameras – Road Traversing Knowledge (RTK) Dataset},
journal = {Revista de Informática Teórica e Aplicada (RITA)},
year = {2019},
doi = {https://doi.org/10.22456/2175-2745.91522},
}
Se você for utilizar o Ground Truth ou a abordagem de segmentação semântica, por favor cite:
title = {Road surface detection and differentiation considering surface damages},
author = {Thiago Rateke and Aldo von Wangenheim},
journal = {Autonomous Robots},
year = {2021},
month = {Jan},
day = {11},
issn = {1573-7527},
doi = {10.1007/s10514-020-09964-3},
url = {https://doi.org/10.1007/s10514-020-09964-3}
}
Dados
Os dados estão separados em 4 sequências de coletas, estão numerados sequencialmente, pode-se extrair todas partes de cada coleta em um mesmo diretório.
Para os dados classificados em tipos de superfície (GT), estão numerados sequencialmente para cada coleta e cada tipo de superfície.
- Total de frames: 77547
- Total de frames em 18102016: 22107
- Total de frames em 15022017: 30969
- Total de frames em 31032017: 9702
- Total de frames em 14042017: 14769
- Total de frames classificados: 62662
- Total de frames classificados como asphalt: 43263
- Total de frames classificados como paved: 13697
- Total de frames classificados como unpaved: 5702
Também disponibilizamos um GT com frames classificados em qualidade da superfície.
- Total de frames classificados para qualidade: 6297
- Total de frames classificados como asphalt(Good): 1978
- Total de frames classificados como asphalt(Regular): 839
- Total de frames classificados como asphalt(Bad): 464
- Total de frames classificados como paved(Good): 1179
- Total de frames classificados como paved(Regular): 324
- Total de frames classificados como paved(Bad): 124
- Total de frames classificados como unpaved(Regular): 796
- Total de frames classificados como unpaved(Bad): 593
Um GT de segmentação semântica da superfície das estradas também está disponível. Esse GT contem além 701 frames. As classes estão definidas da seguinte maneira:
- Background, tudo que não é relacionado com a superfície da estrada;
- Asphalt, estradas com superfície do tipo asfalto;
- Paved, diferentes tipos de pavimento (ex.: lajotas e paralelepípedos);
- Unpaved, estradas sem pavimento, estradas de terra;
- Markings, para as marcações na estrada;
- Speed-Bump, para lombadas;
- Cats-Eye, olhos de gato encontrados na estrada, tanto na parte central como nos limites laterais da estrada;
- Storm-Drain, bueiros e valas normalmente nos limites laterais das estradas;
- Patch, para variados remendos encontrados em estrada de asfalto;
- Water-Puddle, poça de água e também para regiões lamacentas;
- Pothole, para diferentes tipos e tamanhos de buracos, não importando em qual tipo de superfície ocorre;
- Cracks, utilizado em variados danos na estrada como: rachaduras e craquelados.
18102016

15022017

31032017

14042017

Road Surface Quality GT

|
GT (quality classified data) |
|---|
| asphalt(Good) |
| asphalt(Regular) |
| asphalt(Bad) |
| paved(Good) |
| paved(Regular) |
| paved(Bad) |
| unpaved(Regular) |
| unpaved(Bad) |
Semantic Segmentation GT
|
GT (semantic segmentation) |
|---|
| Original Frames |
| No color map Mask frames |
| Colored Mask frames |
| JSON |