Um veículo autônomo precisa identificar ao longo do caminho vários elementos, tais como: a estrada à sua frente, se há necessidade de desviar dos obstáculos fixos ou móveis e até mesmo parar. Um veículo inteligente pode usar diferentes sensores para a percepção dos arredores, sendo separados em 4 módulos: 1) Detecção de Caminho, levando em consideração possíveis mudanças no padrão do terreno (asfalto, estrada de terra, paralelepípedo) e, se há lombadas, poças de água ou buracos. 2) Reconhecimento de Obstáculos, que podem ser: outros veículos, pessoas, animais. 3) Reconhecimento de Sinais, como amplitude de irregularidades na estrada e derrapagens. 4) Propriocepção do Veículo, que deve levar em conta as informações fornecidas pelo veículo: velocidade, aceleração, freio, direção, farol, etc. Toda essa informação é passada para um módulo de Agente Inteligente para interpretação dos dados e tomada de decisão ou emissão de alertas.
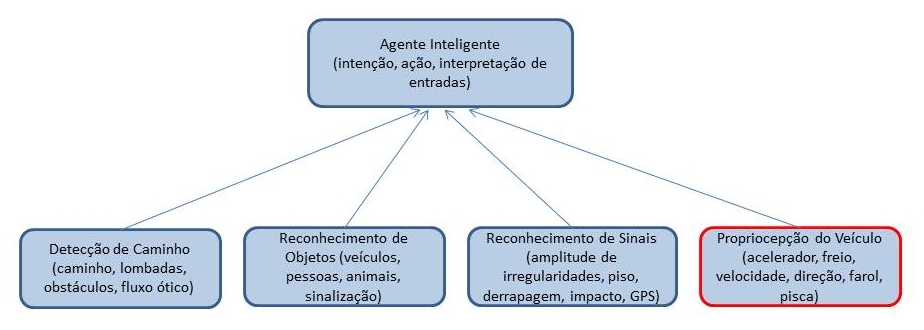
Módulos do Projeto