Identificar um obstáculo é uma das tarefas mais importantes para um sistema de navegação visual. Para identificar a profundidade de objetos na cena são utilizadas técnicas de Visão Estéreo (com base nas informações do Mapa de Disparidade) e Fluxo Óptico para identificar movimento de objetos em quadros consecutivos.
Estamos trabalhando em um novo método combinando Visão Estéreo e Reconhecimento de Objetos com Redes Neurais Convolucionais para Identificação de Ameaças/Pontos de Interesse na navegação veicular autônoma.
Identificação&Segmentação de Objetos com Rede Neural + Mapas de Disparidade Estéreo + Fluxo Ótico mostrando o conjunto de vetores de deslocamento nos objetos:
Mais detalhes e informações em: Página do Artigo
Código fonte utilizado: GitHub
Identificação&Segmentação de Objetos com Rede Neural + Mapas de Disparidade Estéreo + Fluxo Ótico mostrando os vetores de deslocamento resultantes nos objetos:
Identificação&Segmentação de Objetos com Rede Neural + Mapas de Disparidade Estéreo + Fluxo Ótico mostrando resultados de análise dos valores e informações textuais nos objetos:
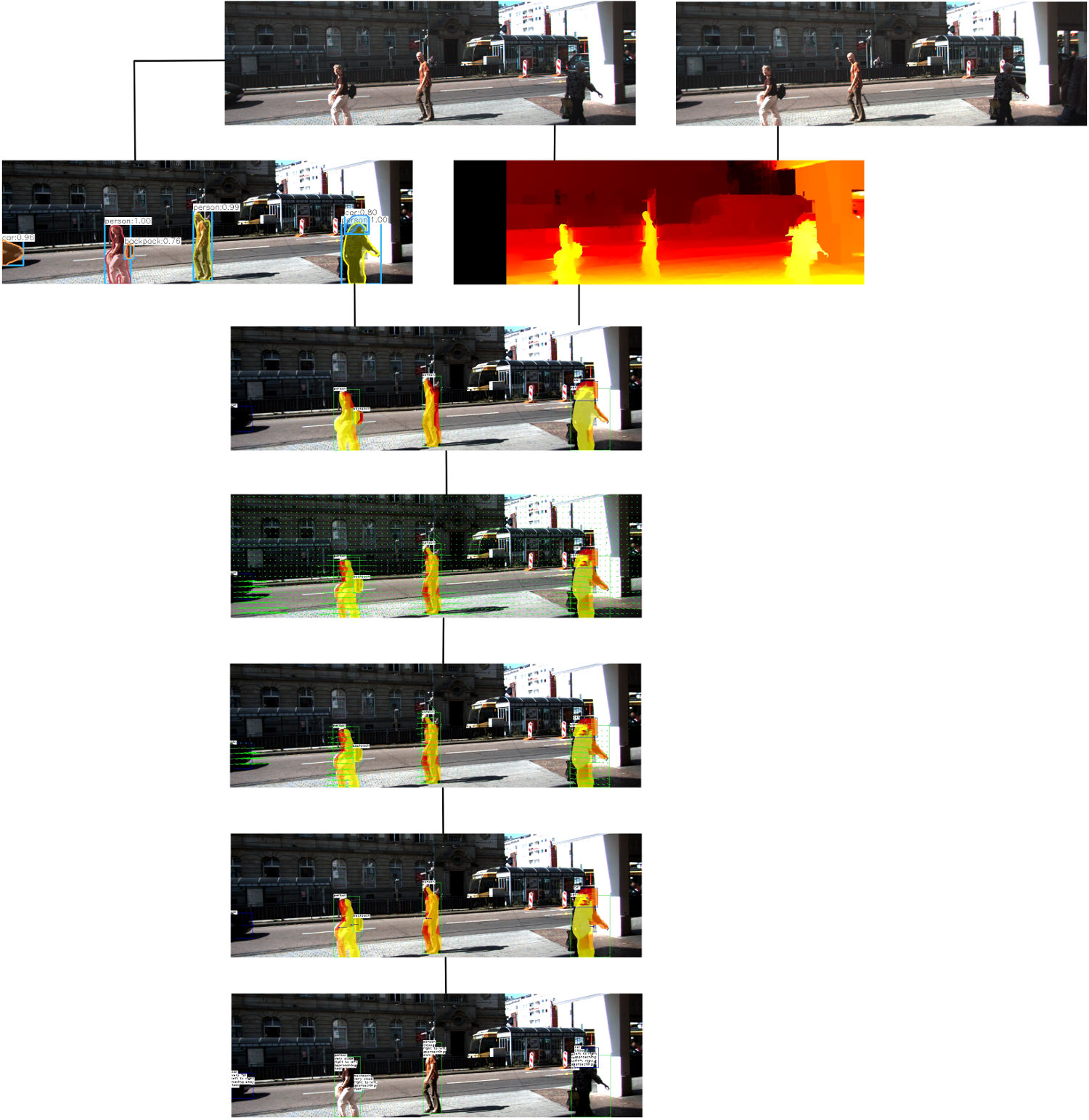
Nosso Processo
A figura abaixo mostra os resultados sucessivos na geração dos conteúdos dos videos acima: do video estereoscópico são geradas tanto a identificação e segmentação dos objetos de interesse quanto o mapa de disparidade/profundidade da cena. A partir daí são calculados tanto o fluxo ótico quanto as combinações de dados que aparecem no video.
@misc{rateke:2020.2,
author = {Rateke, Thiago and Wangenheim, Aldo von},
title = {Road obstacles positional and dynamic features extraction combining object detection, stereo disparity maps and optical flow data},
journal={Machine Vision and Applications},
year = {2020},
month={Sep},
day={25},
volume={31},
number={7},
pages={73},
issn={1432-1769},
doi={10.1007/s00138-020-01126-w},
url={https://doi.org/10.1007/s00138-020-01126-w}
}
Para a detecção de obstáculos é importante saber a distância do obstáculo em relação à fonte de captura. Deste modo, é utilizado o cálculo do Mapa de Disparidade (MD), que é a representação de profundidade da cena em tons de intensidade, onde quanto mais claro significa que está mais próximo das câmeras e quanto mais escuro significa que está mais distante. O cálculo do MD é permitido graças à visão estéreo.
Além da distância, outra característica importante a ser analisada em obstáculos é a sua movimentação. Para se obter essa informação de movimentação é utilizado o cálculo de Fluxo Ótico.
* Utilizamos, nos experimentos, imagens da base de casos fornecida pela KITTI.