Contents
Mobile Apps User Interfaces
Intelligent Vehicle
![]()
This project aims to develop models for vehicular perception and control through passive video and inertial sensor signals acquisition and newest Artificial Intelligence. Vehicular perception comprises exteroception and proprioception. Exteroception aims to understand the environment outside the vehicle, recognizing the path features on which it travels. These features include transient events in the form of anomalies and obstacles, such as potholes, cracks, speed bumps, etc.; and persistent events, such as surface type, conservation condition and the road surface quality. On the other hand, proprioception aims to understand vehicular movements in order to allow the vehicle identify its own behavior and attitude. The identifications can also be transient in the form of driving events, such as lane change, braking, skidding, aquaplaning, turning right or left; and persistent, as a safe or dangerous driving behavior profile.
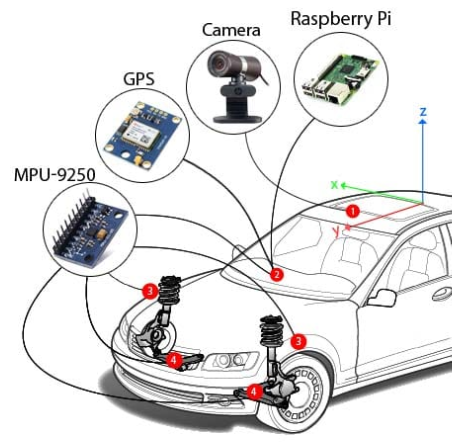
For the development of this project, we are collecting datasets in Brazilian locations, more specifically upstate Santa Catarina, with contextual variations using GPS, camera and inertial sensors, represented by accelerometers and gyroscopes. These data are being produced in many different vehicles, driven by different drivers, traveling through different environments, from highways down to badly maintained dirt roads. To recognize and classify the vehicular perception patterns, we have developed several models based on Artificial Intelligence and Deep Learning. Below we describe the datasets produced, models developed and the results obtained, together with published article and source-codes.
- Intelligent Vehicle Perception Based on Inertial Sensing and Artificial Intelligence dataset and code (2020)
- Road Traversing Knowledge (RTK) Dataset (2019)
The project is active and we are currently developing new models for new perception patterns recognition. Below are described the research progress. Published articles can also be found on our project page at Projeto Veículo Autônomo and also at Research Gate.
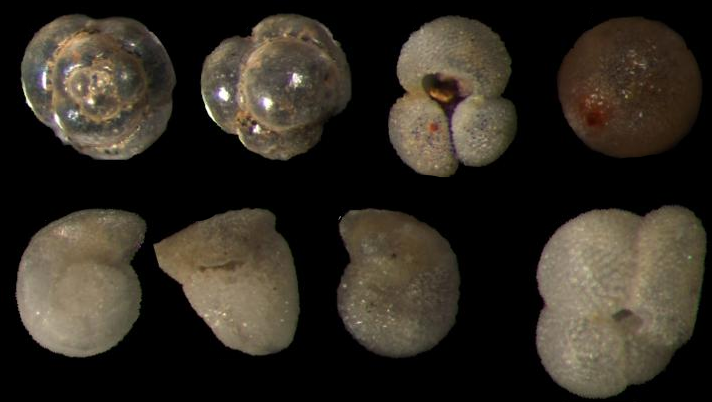
Paleontology
Precision Agriculture/UAV Images
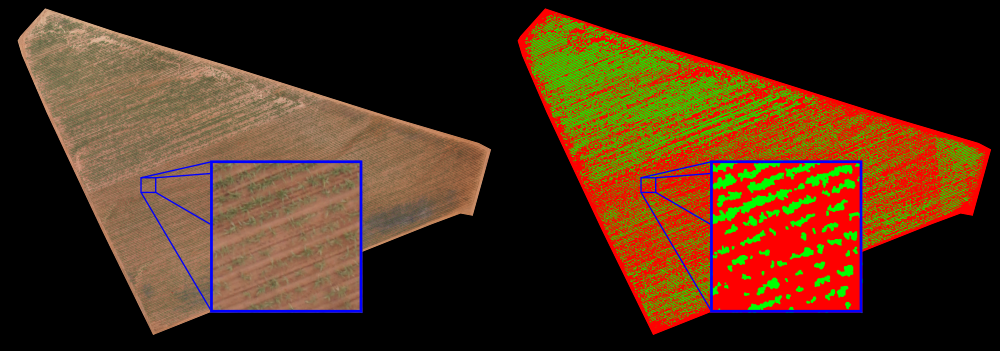
- Crop Rows Identification and Segmentation (2018, Sugar Cane – Northern Brazil)
- Weed Mapping (2018, Sugar Cane – Northern Brazil)
Meteorology and Solar Energy/Sky Imager Datasets

Cytology
