Esta pesquisa tem como objetivo principal o desenvolvimento de um modelo adaptativo de percepção veicular através de sinais de sensores inerciais e técnicas de Aprendizado de Máquina. A percepção veicular compreende a percepção de ambiente e a propriocepção. A percepção de ambiente busca reconhecer características do ambiente no qual o veículo trafega. Estas características incluem o tipo de superfície de pista, a qualidade de conservação do pavimento, a identificação de obstáculos, como lombadas, e anomalias, como buracos, etc. Já a propriocepção busca identificar o comportamento do veículo através de seus movimentos. Os eventos de comportamento incluem aceleração, frenagem, realizando curva à esquerda ou à direita, perfilar a comportamento de condução, etc. Para produzir estas informações, utilizamos de dados provindos de sensores inerciais, os quais pela sua abordagem passiva, constituem um meio seguro, não poluente e de baixo custo. Representados por acelerômetros e giroscópios, estes sensores se baseiam no princípio da inércia para produzir seus dados, gerando medições de força de aceleração e de taxa de rotação, ambos em três eixos físicos. Neste estudo, estes sinais são resultantes da tração do veículo e das interações com o ambiente no qual ele trafega.
Neste campo de pesquisa, a aplicação de sensoriamento inercial em veículos possui quatro fatores de dependência. O primeiro, relaciona-se às propriedades sensoriais, sendo a orientação do sensor, sua faixa de medição e taxa de amostragem. O segundo, relaciona-se às propriedades veiculares, sendo o impacto do sistema de suspensão no referencial de forças, tanto pela massa suspensa quanto pela não suspensa. O terceiro, relaciona-se a propriedades de condução, especialmente pela velocidade aplicada. Por fim, o quarto refere-se às propriedades ambientais, relacionadas às características do ambiente de coleta de dados. Todos estes fatores impactam diretamente na adaptabilidade da solução final, de forma que os modelos desenvolvidos consideram estas dependências para que sejam seguros e confiáveis quando aplicados em cenários não controlados, tais como os do mundo real. Portanto, os modelos desenvolvidos buscam manter o correto funcionamento quando aplicado em diferentes veículos, com diferentes condutores, trafegando em diferentes ambientes.
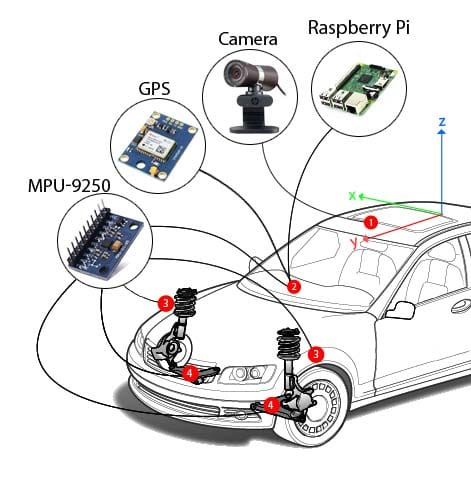
Dado estes fatores de dependência, para ser possível validar os modelos propostos, realizamos diversas coletas de dados com variações contextuais. As variações incluem a produção de dados em três veículos diferentes, com três condutores diferentes, em três cenários distintos. Há ainda variação nas características ambientais de cada cenário, assim como no estilo de condução. Para as coletas de dados, os sensores inerciais foram posicionados em três lugares diferentes da estrutura veicular, conforme ilustra a figura abaixo. Dispositivos auxiliares, como GPS e câmera, também foram empregados, todos de abordagem passiva. Após coletados, os dados brutos foram pré-processados no domínio do tempo e da frequência. De forma a avaliar corretamente capacidade de aprendizado e generalização dos modelos para cenários não controlados, separamos os dados coletados três experimentos específicos. No primeiro a técnica aprende todos os veículos e motoristas para alguns cenários. No segundo, a técnica aprende todos os cenários para alguns veículos e alguns motoristas. No terceiro, a técnica aprende alguns veículos com alguns motoristas para alguns cenários, mas não todos os veículos com todos os motoristas para todos os cenários. Definidos os experimentos, os dados foram aplicados em diferentes modelos de Aprendizado de Máquina. De forma a avaliar a abordagem mais adequada, produzidos e experimentamos modelos baseados em técnicas clássicas e técnicas de Deep Learning. Dentre as técnicas clássicas, experimentamos KMC, KNN e SVM. Dentre as técnicas de Deep Learning, experimentamos redes baseadas em LSTM, CNN, GRU, CNN-LSTM e ConvLSTM. Os modelos baseados em Deep Learning tem se mostrado superiores às técnicas clássicas, com valores de acurácia muito maiores.
Os modelos resultantes possuem ampla aplicabilidade em todo o domínio de Sistemas de Transporte Inteligentes (STI). No suporte à tomada de decisão humana, podem ser aplicadas em sistemas gerenciais para planejamento de rotas no escoamento de produção, planejamento de manutenção de vias e controle de tráfego, caixa preta veicular, Sistemas Avançados de Assistência ao Condutor (ADAS), entre outros. No suporte à tomada de decisão de máquina, estes dados podem ser empregados em veículos autônomos para auxiliar na coordenação de suas ações, especialmente quando aplicados em conjunto com informações de percepção provindas de visão computacional.
A percepção veicular baseada em sensoriamento inercial busca realizar o reconhecimento de pista na qual o veículo trafega, através de confirmações por meio de evidências provindas de métodos baseados em vibração. Contextualizado em um sistema dinâmico baseado nas leis da mecânica clássica, os reconhecimentos efetivados através dos sinais captados podem ser subcategorizados em identificação e classificação de irregularidades do pavimento, obstáculos na via e qualidade ou composição de superfície de pista.
Acelerômetros
Capazes de aferir a aceleração linear na direção de um eixo referencial. Aceleração é a taxa de variação da velocidade no tempo, representada em m/s2 (metro por segundo ao quadrado) no Sistema Internacional;
- Mede forças inerciais (aceleração) aplicadas, incluindo o componente de gravidade;
- Velocidade.
Giroscópios
Capazes de medir a velocidade angular em torno de um eixo de referência. A velocidade angular é uma grandeza que representa a taxa de variação da posição angular no tempo, cuja unidade de medida no Sistema Internacional é o rad/s (radiano por segundo).
- Referencial de direção.
Magnetômetro
- Referencial de posição. Angulos em relação ao sistema de coordenadas do mundo real;
- Empregado no mapeamento de forças do acelerômetro.
Gravidade
- Força de aceleração gravitacional nos três eixos físicos do sensor.
GPS
- Localização;
- Velocidade.