Motivation
Research on autonomous vehicles for civilian use has been mostly directed at road conditions commonly found in developed countries, supposing good pavement conditions and adequate road maintenance. Research has been ignoring the problems posed by dirt roads, large potholes, dirt ruts and unexpected interruptions on the pavement, conditions commonly found in in-development countries, even in certain parts of urban areas, such as city outskirts. An autonomous vehicle, to be successfully usable in an in-development country context has to be able to cope with these conditions not only during exceptional, extra urban usage, but also during normal, daily urban traffic, operation.
According to the National Transportation Confederation in Brazil, of 103,259 km of roads analyzed in 2016 (covering the entire federal road network and the main paved state highways), 48.3% received a regular, bad or poor classification in relation to the pavement. With an increase of critical points (which include large potholes) of 26.6% compared to the year 2015 (CNT, 2016).
On the other side, road and obstacle recognition employed in autonomous vehicles has been heavily dependent on information gained from active terrain recognition methods, mainly LIDAR. We understand that, whilst autonomous vehicles are a rare phenomenon, pollution caused by LIDAR is not a concern and cannot be considered a health hazard. If, however, one imagines a typical 5 pm traffic jam situation in any big city, in a scenario where all those cars are autonomous vehicles, then, during a short walk from the office to the tube station or while waiting at the bus stop, the eyes of a typical pedestrian would be exposed to the laser emissions of thousands of cars and this every single day. The retinas of this pedestrian would potentially receive a massive amount of laser emission, even if every single laser is a very low intensity source. This scenario could pose a health hazard.
In (GROUP SAFETY PUBLICATION. Safety of laser products.) it is presented a table with the categorization of the lasers and the possible risks with the excess of exposure in each one of the levels. Lasers with a wavelength between 780nm and 1400nm, which is the range of LIDAR, can cause cataracts and burn the retina.
Autonomous cars are a new technology and there are almost no studies about health hazards caused by them. We still cannot tell if long-time exposure to this “lasersmog” scenario presents a serious hazard or not, but we understand that it is a promising strategy to develop an autonomous car concept that does not depend on active, laser-based vision for road and obstacle recognition, in the same way that human drivers also do not depend on it.
OBJECTIVES
Based upon those two general strategy guidelines posed above, the objective of our project is to develop and test a concept for an autonomous vehicle that:
- is able to navigate both urban and extra-urban conditions typically found in in-development countries, being capable to cope with unmapped roads, dirt roads, dirt ruts, large potholes, interruptions on the pavement, ditches and gullies and
- can perform these navigation tasks without having to rely on active vision methods, using for its visual perception solely passive vision approaches, cameras.
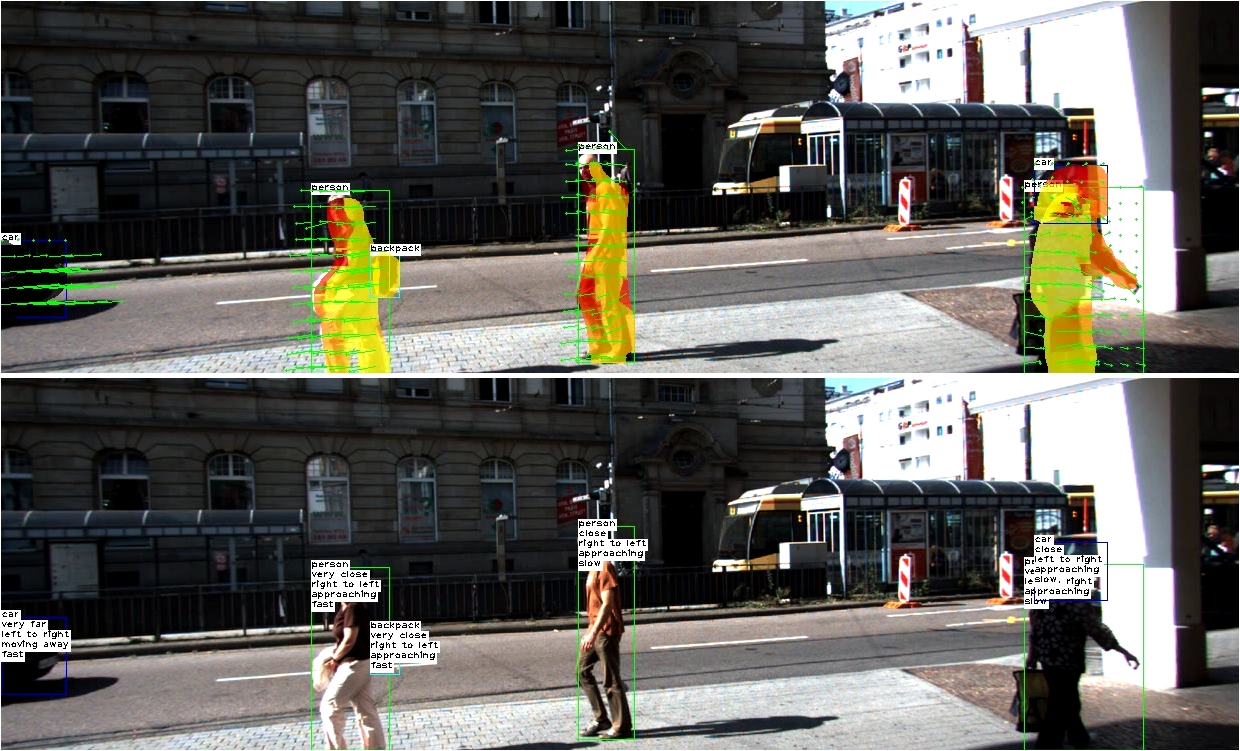
Detecting and extracting movement and distance from obstacles using the KITTI dataset. More info here.


